
This post is also available in:
di Emmanuele Sordini and Lorenzo Comolli
Alcuni mesi fa avevo scritto un dettagliato articolo in cui si esaminavano le prestazioni della MagZero MZ-5m, in particolare per quanto riguarda la sua usabilità come camera per autoguida. Ora presento il seguito di tale articolo, che mette sotto i riflettori la qualità dell’immagine di questa camera, confrontandola con una vecchia gloria delle riprese ad alta risoluzione nel mondo amatoriale: la Philips Vesta Pro (modificata con sensore B/N e firmware per la modalità raw).
Ormai conosciamo tutti la MagZero MZ-5m, versione italiana della QHY5: già oggetto di un precedente articolo su queste stesse pagine, ne avevamo apprezzato i lati positivi, come ad esempio la compattezza e la praticità d’uso (grazie alla porta ST4 integrata), unite ad un prezzo molto interessante.
Recentemente Lorenzo Comolli ed io ci siamo visti presso il suo Osservatorio per effettuare una prova fianco a fianco tra la MZ-5m e una vecchia gloria delle riprese ad alta risoluzione, la Philips Vesta Pro. nella versione modificata con un sensore in bianco e nero, e il firmware modificato per l’acquisizione in modalità raw. Questa modifica la rende molto più sensibile e consente di disporre della massima risoluzione permessa dal sensore, caratteristica che la rende adatta all’imaging planetario e anche come strumento di autoguida.
Possiamo innanzitutto riassumere le caratteristiche delle due camere in una tabella comparativa che ci tornerà utile più avanti:
| Camera | Dim. pixel (micron) | Risol. pixel (h x v) | Dim. sensore (mm) | Tipo sensore |
|---|---|---|---|---|
| Magzero MZ-5m | 5.2 x 5.2 | 1280 x 1024 | 6.66 x 5.32 | CMOS |
| Philips Vesta Pro B/W | 5.6 x 5.6 | 640 x 480 | 3.58 x 2.50 | CCD |
Da questa tabella appare subito chiara la notevole differenza in numero di pixel e dimensioni del sensore a favore della MZ-5m.
La prova comparativa
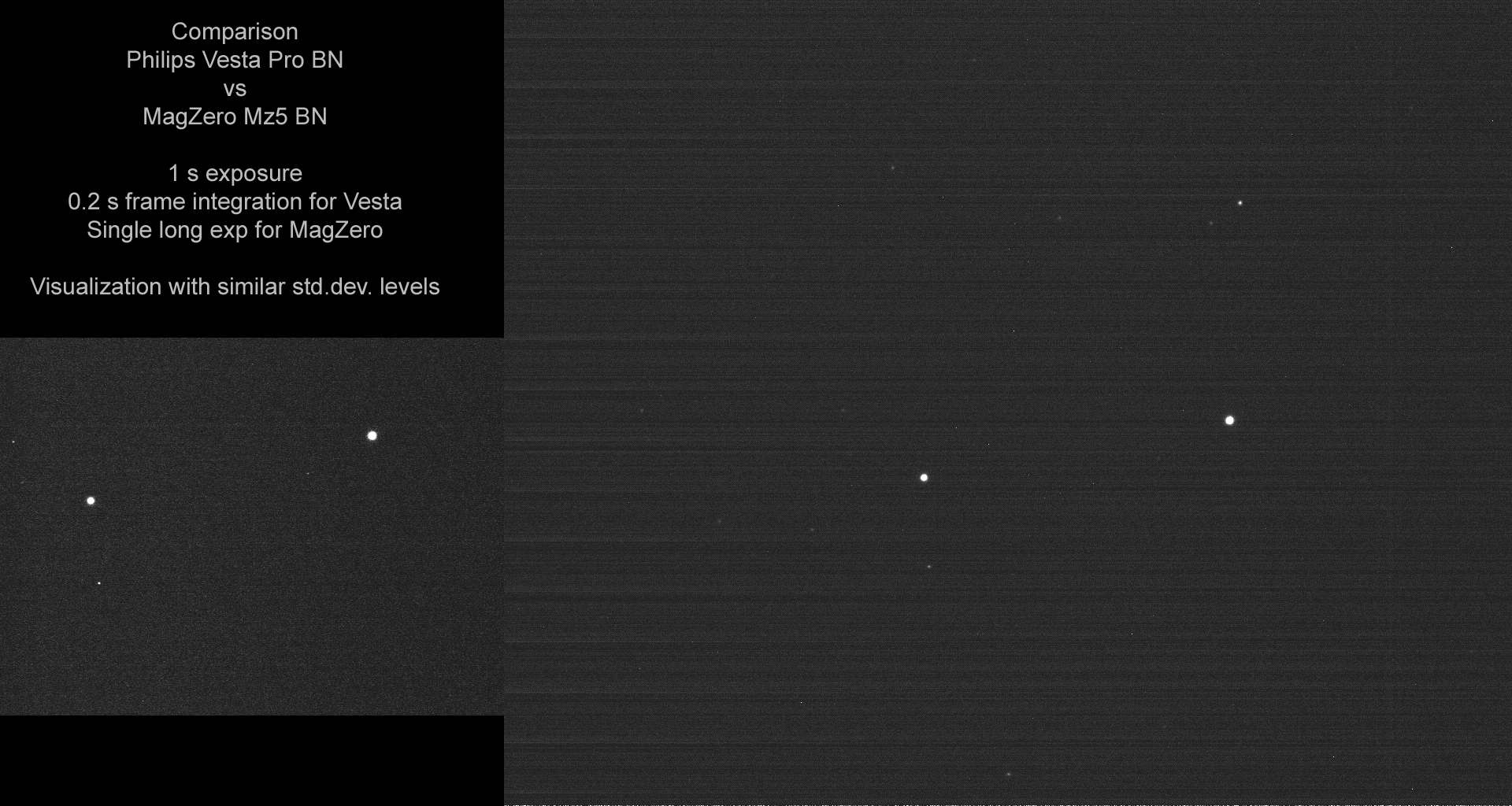
La prova è stata effettuata il 2 marzo 2008, in una sera serena e trasparente seguita ad una giornata di intenso foehn, con una temperatura di circa 10 °C. Ottica utilizzata, il rifrattore Pentax 75 (500 mm di focale) di Lorenzo, in parallelo al newtoniano da 310 mm f/5 (ottiche Maccagnan) il quale a sua volta è in parallelo alla camera di Schmidt. Le riprese hanno inquadrato la stessa porzione di cielo per renderle confrontabili. Ecco la lista delle pose:
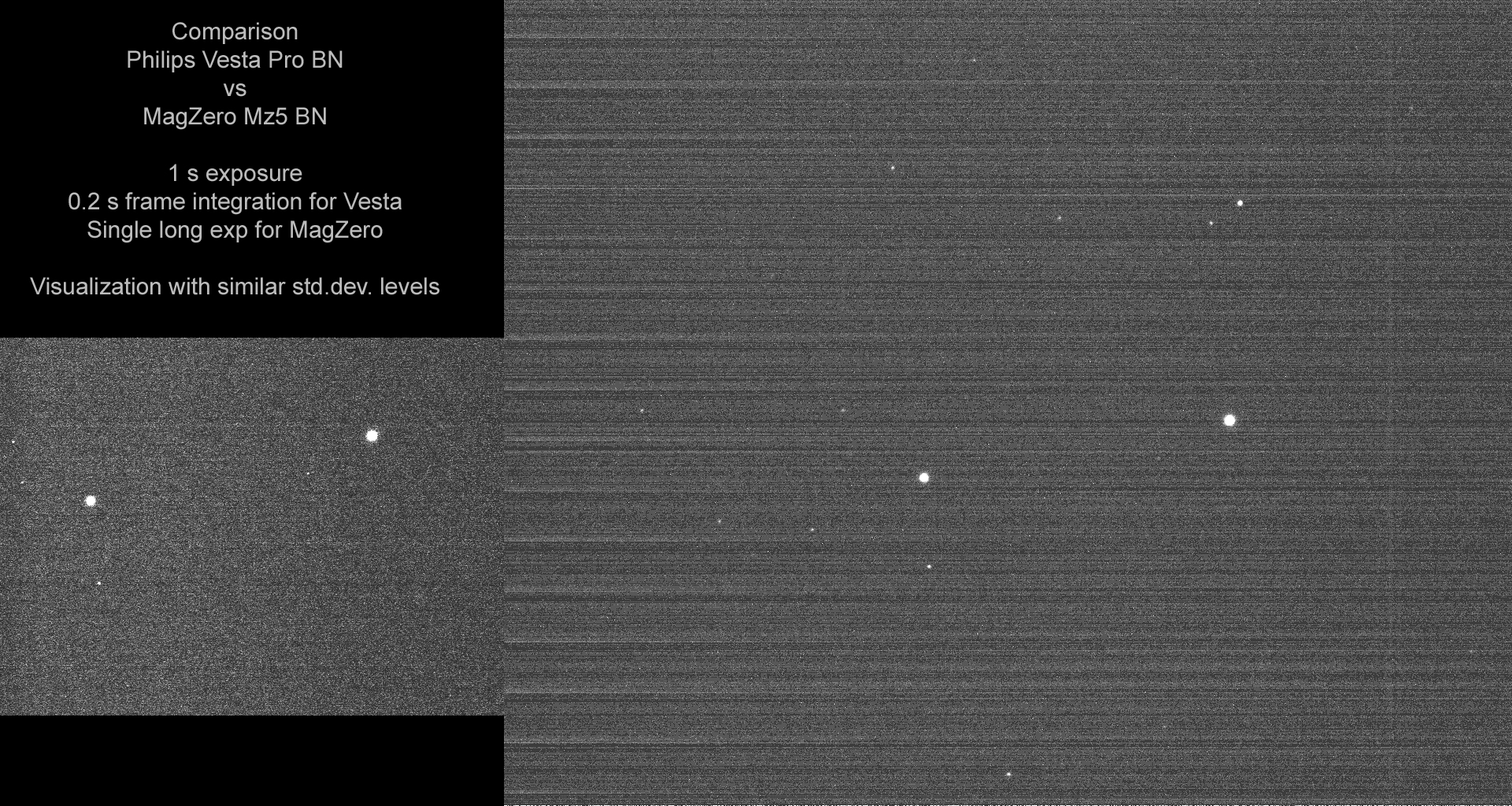
- Philips Vesta Pro, tempo di posa 1 s (integrazione di 5 pose da 0.2 s)
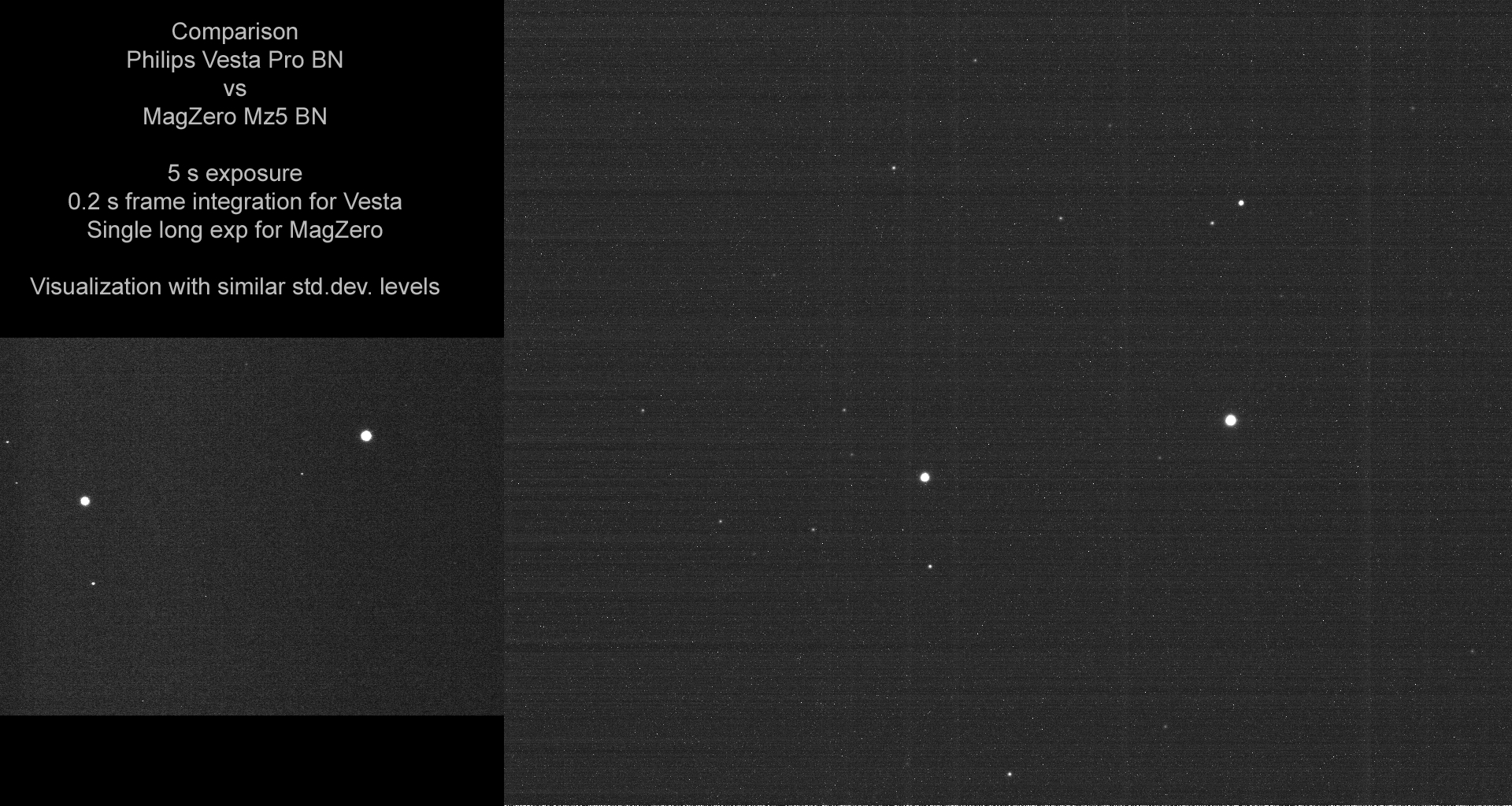
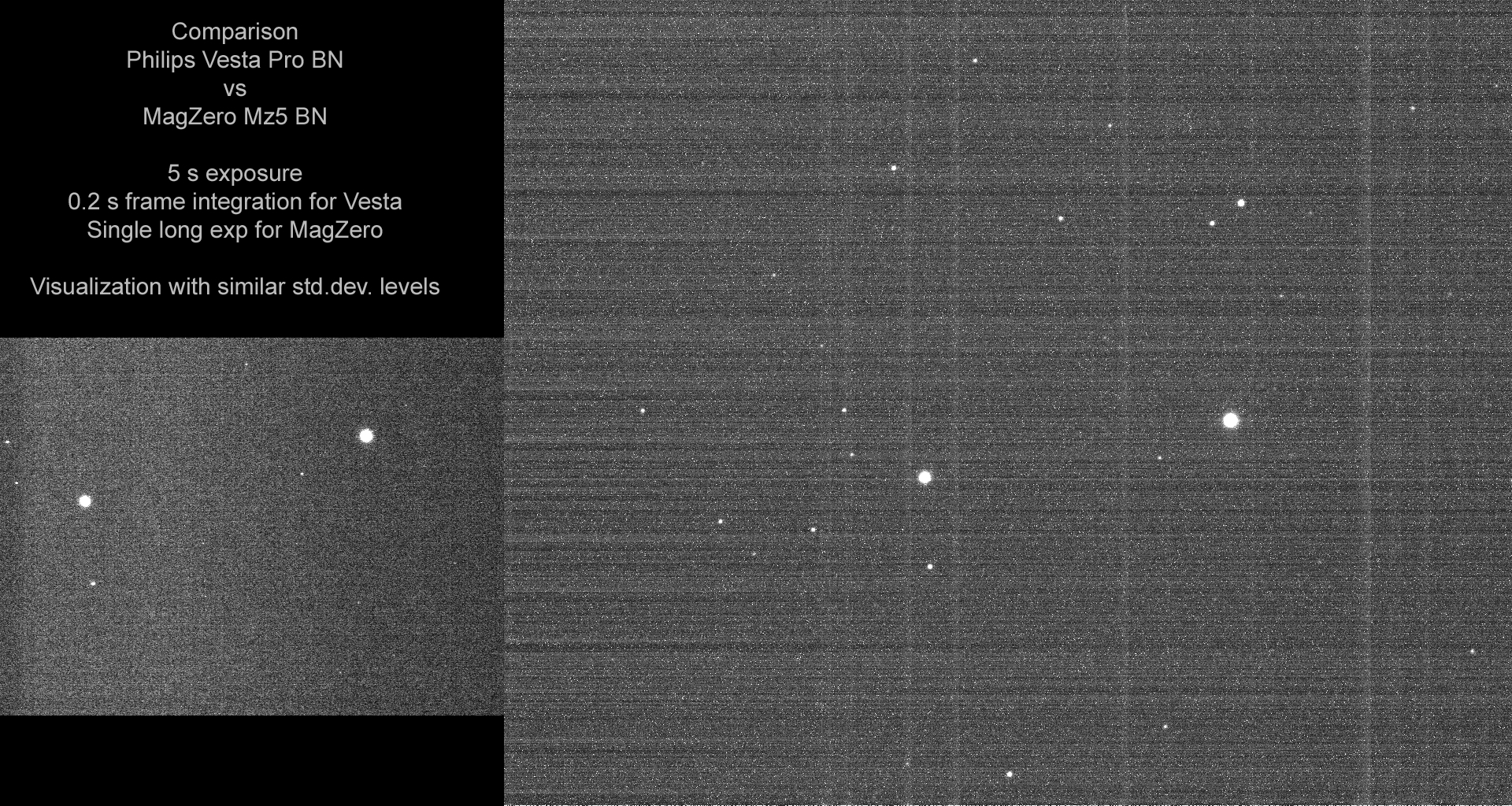
- Philips Vesta Pro, tempo di posa 5 s (integrazione di 25 pose da 0.2 s)
- Magzero MZ-5m, tempo di posa 1 s (singola esposizione)
- Magzero MZ-5m, tempo di posa 5 s (singola esposizione)
Queste quattro pose possono essere unite a coppie mettendo fianco a fianco quelle effettuate con camere diverse a parità di altre condizioni. Di seguito riportiamo tuttte le immagini, su cui è possibile cliccare aprendo uno zoom a maggiore ingrandimento (attenzione: richiede una risoluzione minima di 1280 x 1024 pixel). In alternativa, per avere il massimo dettaglio si possono salvare localmente le immagini originali, che hanno una dimensione di 1920 x 1024 pixel.
Presentiamo le immagini in due “gusti” diversi, ottenuti tramite l’applicazione di screen stretch diversi. Essendo μ il valore medio in ADU del segnale dell’immagine e σ la sua deviazione standard, abbiamo applicato i seguenti intervalli di stretching:
- Caso A. Intervallo pari a [μ – 5 σ, μ + 25 σ];
- Caso B. Intervallo pari a [μ – 3 σ, μ + 6 σ].
Ovviamente, l’intervallo nel caso B rende lo stretching molto più esasperato, ed è utile per esaltare i difetti eventualmente presenti nell’immagine.
Chi avesse voglia di provare a giocare con i FIT originali da cui sono state realizzate le compositazioni di cui sopra, li può scaricare a questo link.
Dall’analisi di queste immagini, effettuata anche in modo quantitativo tramite Maxim DL, si possono trarre alcune interessanti osservazioni:
- A parità di tempo di posa, la sensibilità delle due camere è praticamente la stessa (con forse un lievissimo vantaggio a favore della Magzero, anche grazie al fatto di aver realizzato una singola posa e non una integrazione di tante pose brevi);
- A parità di tempo di posa, l’immagine ripresa con la Magzero è di qualità assai inferiore, disturbata com’è da bande orizzontali e verticali e da pixel caldi; la situazione peggiora all’aumentare del guadagno e del tempo di posa.
Con la Magzero abbiamo utilizzato i driver più recenti (versione 2.6) che secondo il produttore dovrebbero diminuire il rumore e le righe tramite una apposita funzione (Enhanced Noise Reduction, o ENR). Abbiamo provato a disattivarla, e in effetti si faticavano a vedere le stelle inquadrate nel campo! Pur ammettendo che con la riduzione di disturbo attivata queste righe attenuino di molto, e che la loro presenza non sembri pregiudicare le prestazioni in autoguida, ci domandiamo se sia normale averle in una camera dedicata ad uso astronomico e concepita in questi anni.
Per quanto riguarda i pixel caldi, ci sono due soluzioni possibili:
- Utilizzare l’apposita funzione presente nel driver della Magzero, che probabilmente consiste in un kernel 3 x 3 che funziona da filtro passa-basso. In questo modo i pixel caldi effettivamente diminuiscono, ma non vengono del tutto eliminati; inoltre, il filtro ha l’effetto collaterale di sfocare apprezzabilmente l’immagine.
- Sottrazione automatica del dark frame. E’ sicuramente più efficace del metodo precedente, ma anche più scomodo perché il dark frame dev’essere preso manualmente (causa l’assenza di otturatore meccanico) e comunque ogni volta che cambia la temperatura (quindi, anche più di una volta nel corso di una sessione osservativa).
Per quanto riguarda le prestazioni nell’autoguida, sono state effettuate diverse pose da 5 minuti con camera CCD FLI ME2 al fuoco diretto del Newtoniano (1260 mm di focale), durante le quali ambedue le camere si sono comportate abbastanza bene, soprattutto tenendo conto della corta focale del telescopio guida, notevolmente più corta di quella di ripresa, e delle condizioni tutt’altro che ideali (presenza di vento e cattivo seeing).
Conclusioni
In soldoni: chi è il vincitore di questa prova? La risposta non è univoca, ma dipende dagli aspetti considerati:
- Dimensione del pixel: parità
- Rumore di fondo/hot pixel: Vesta Pro
- Dimensione del sensore: Magzero MZ-5m
- Porta ST4 integrata: Magzero MZ-5m.
La conclusione è dunque che la MZ-5m, in quanto camera dedicata, è più pratica da utilizzare della Vesta Pro per le generose dimensioni del sensore e la presenza della porta ST-4 integrata. Tuttavia essa delude nettamente nel confronto del rumore di fondo e soprattutto per la presenza di molti pixel caldi, ambito in cui la Vesta Pro vince a mani basse. E il confronto è ancora più netto se si pensa che tra il progetto delle due camere sono passati cinque o sei anni, un tempo biblico nel campo dell’elettronica. E l’argomentazione che la Vesta Pro abbia un sensore CCD invece di un CMOS (v. tabella iniziale) non è affatto convincente: basti pensare alle ottime prestazioni delle DSLR Canon (che hanno sensori CMOS) rispetto alle Nikon (che hanno tradizionalmente avuto sensori CCD, e in parte ancora li hanno).
Non si può quindi nascondere la delusione per la scarsa pulizia delle immagini della Magzero, che a nostro parere la rende assolutamente inadatta alla ripresa del profondo cielo; e nutriamo più di un dubbio anche sua utilizzabilità per riprese planetarie e lunari, nonostante l’elevato rapporto segnale/rumore degli oggetti osservati, perché un buon dark frame non è sufficiente a ripulire bene l’immagine dalle righe.
Rimane quindi l’applicazione come camera di autoguida: le pose fatte quella sera sono nel complesso andate bene, ma ci domandiamo se l’eccessiva presenza di pixel caldi non possa pregiudicare la qualità dell’autoguida, soprattutto in vista della bella stagione che porta come al solito temperature più elevate. Non avendo per ora elementi sufficienti per esprimere un giudizio univoco, ci vorranno sicuramente altre prove. Nel frattempo, sarà necessario scegliere stelle di guida non troppo deboli (per evitare che si confondano con gli eventuali pixel caldi), e agire sulla regolazione del guadagno per ottenere il migliore compromesso tra pulizia dell’immagine e sensibilità.